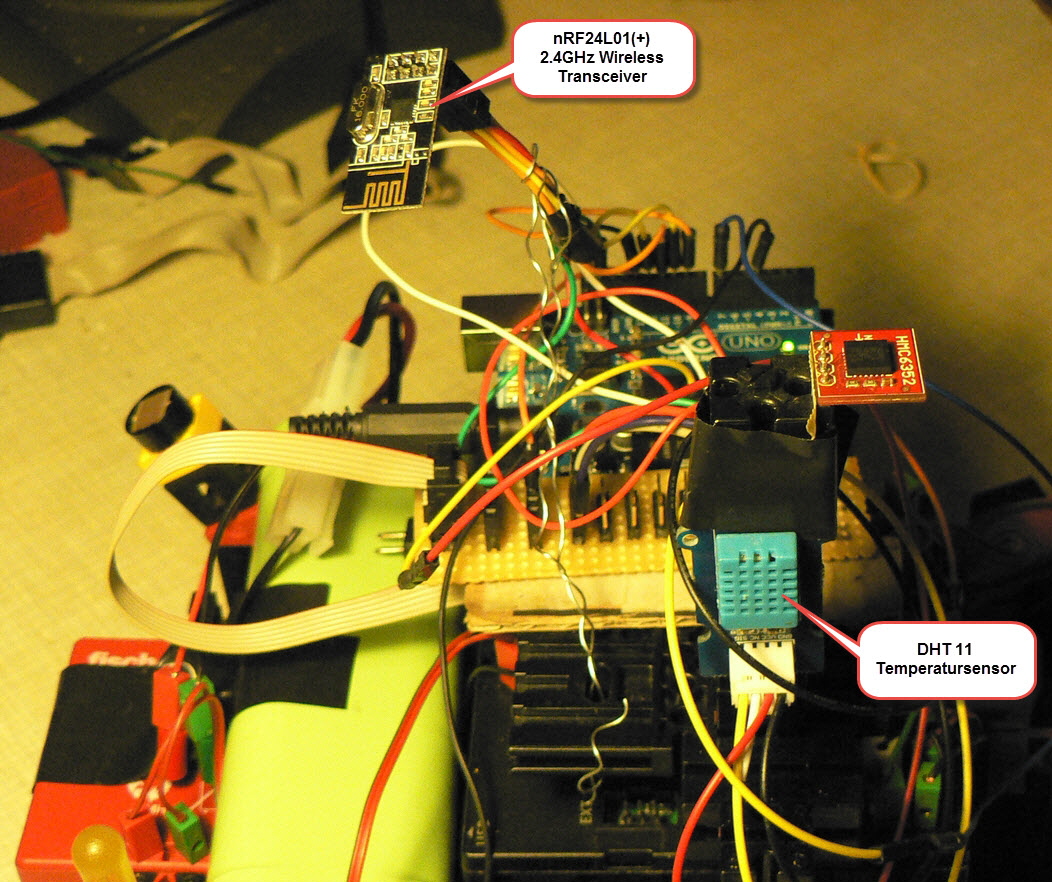
Fischertechnik Tank mit Ultraschallsensoren, Kompass HMC6352 und Temperatursensor DHT11 für den autonomen Betrieb, über I2C (TWI) verbunden mit
einem Arduino Uno Controller Board mit nRF24L01+ 2,4 GHz Transceiver für den RC Betrieb. |
|||||||||||
 |
|||||||||||
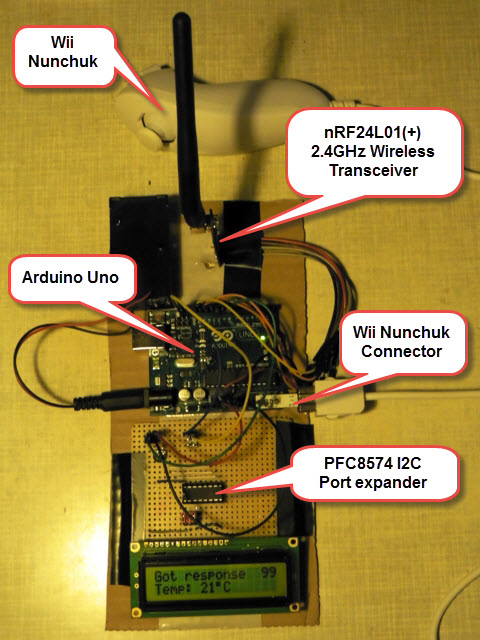
Die Fernsteuerung besteht aus einem Arduino Uno Board an dem ein LCD Display über ein PCF8574P I2C Portexpander Board betrieben wird. Auf
dem Display werden die vom Tank empfangenen Steuerdaten und die aktuelle Temperatur die vom Tank mittels DHT 11 gemessen wird, angezeigt- Gesteuert wird der Tank mit einem Wii Nunchuk Controller im Gyroskop
Modus, die digitalen Steuerdaten (Steuercommandos) werden mit dem nRF24L01+ 2,4 GHz Transceiver an den Transceiver am Arduino Board zu dem Tank übertragen. |
|||||||||||
 |
|||||||||||