PCduino3 <-> Arduino Mega Robo / RC Tank
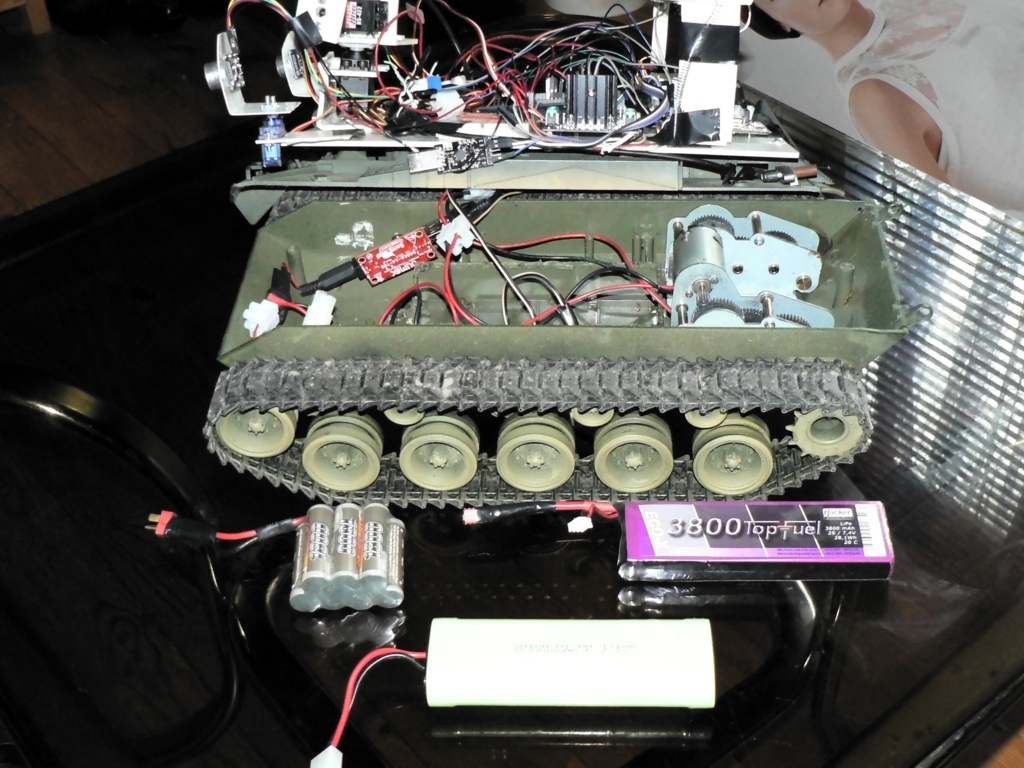
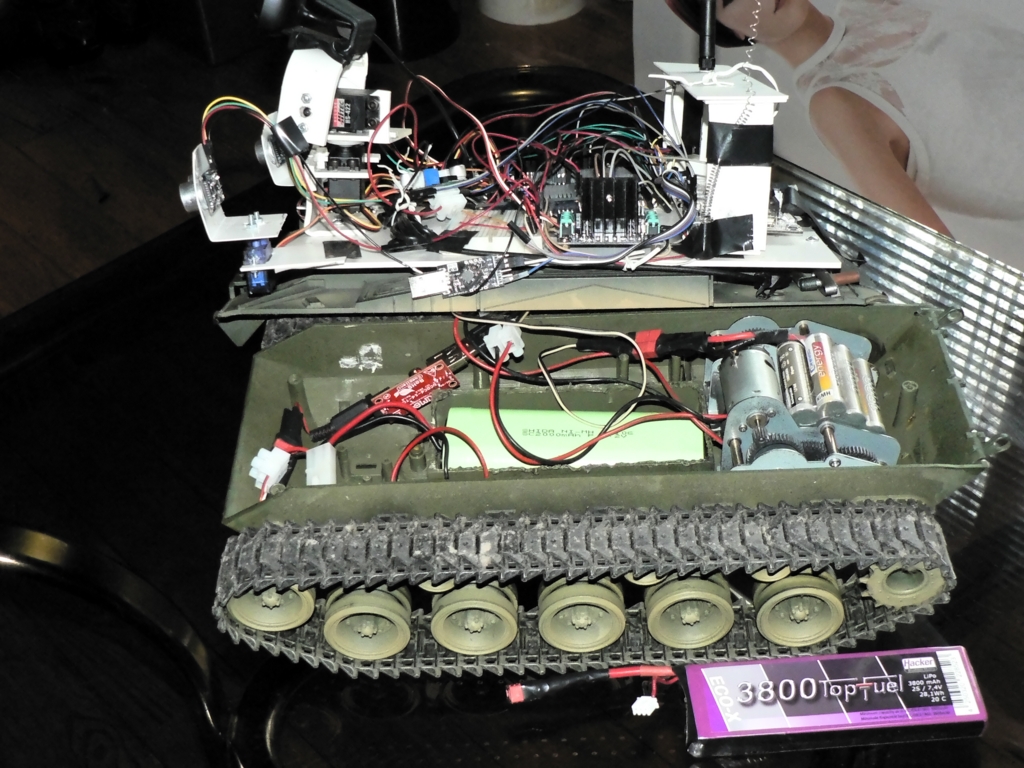
Als Basis dient ein Heng Long Tank von dem ich bis auf das Getriebe und die DC Motoren alles abgebaut habe. Als Abstandssensoren verrichten zwei SRF04 Ultraschallsensoren auf kleinen Servos ihren Dienst, die vom Arduino Mega Board abgefragt werden. Die
Steuerung der Sensor-Servos übernimmt ebenfalls der Arduino. Das Arduino Board sendet bei einem Hindernis einen Wired Interrupt an den PCDuino (ein GPIO Pin, der über ein Kabel mit beiden Boards verbunden ist, wird von
LOW nach HIGH gesetzt) die Sprachausgabe in cm erfolgt dann über einen interrupted Thread im Command Server. Die Sprachausgabe wird über eine Stereo Aktiv Box mit eigenem Akku realisiert.
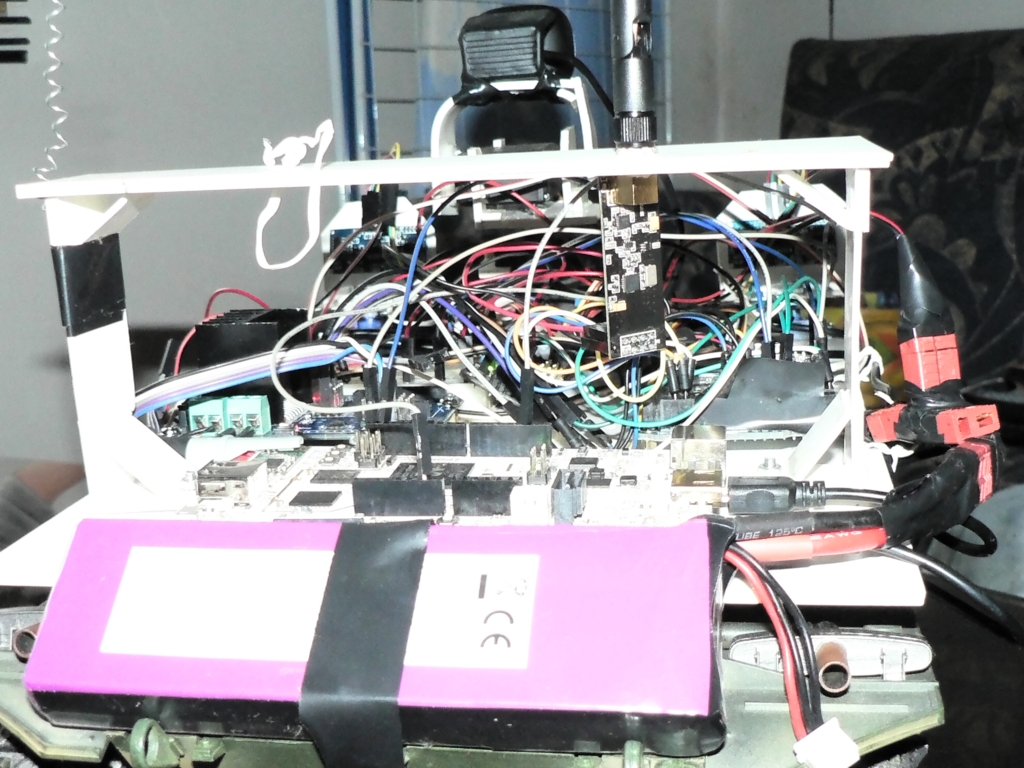
Das PCDuino3 Board mit Ubuntu Image fungiert als WIFI Access Point, Command Server , Streaming Video Server und erledigt
auch die Sprachausgabe. Mein TCP/IP Command Server rs empfängt die Servo und Drive Steuer Kommandos von meiner Android App über WLAN und sendet diese über I2C an das Arduino Mega Board, das die Steuerkommandos auf den Servos und
dem Motortreiber umsetzt. Gleichzeitig holt sich die App vom Streaming Videoserver die Ausgabe der Webcam und stellt diese dar.
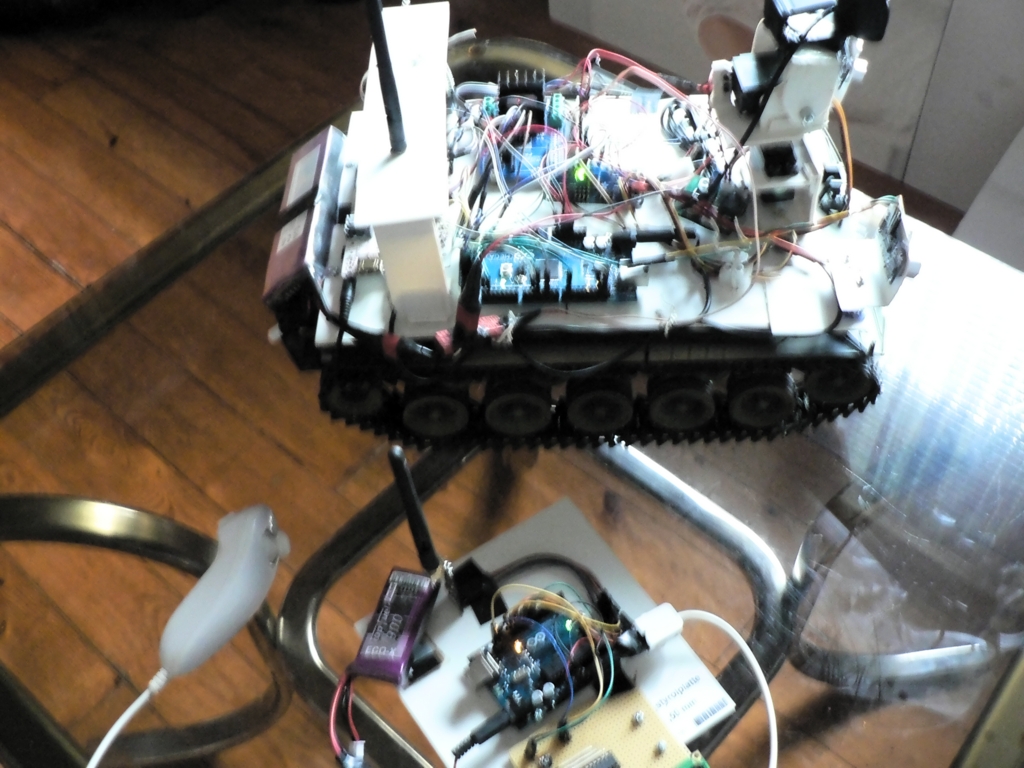
Ausserdem kann der Tank und die Kamera Servos über ein nRF24L01+ 2,4 GHz Transceiver Modul mit der
Wii Nunchuk Fernsteuerung aus Robotik - 2, gesteuert werden.